ロボット 関節 構造
Http Www Eo U Tokai Ac Jp Eo Suzuki Vl Rt Ad 9c 81 Ae E6 9f E6 8b Pdf
知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab
多関節ロボットを部分的に利用する事の構造的メリット

17 号 ロボットアームの関節構造 ロボット装置の測定方法 およびロボット装置の制御方法 Astamuse

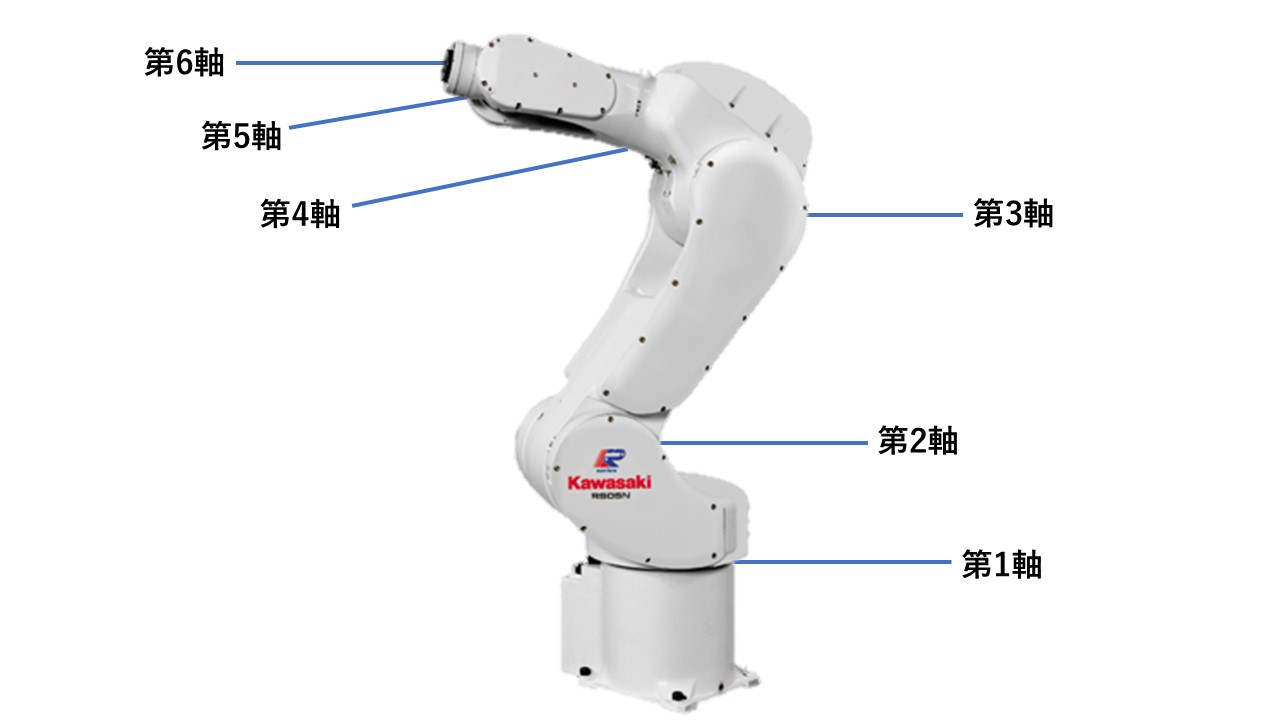
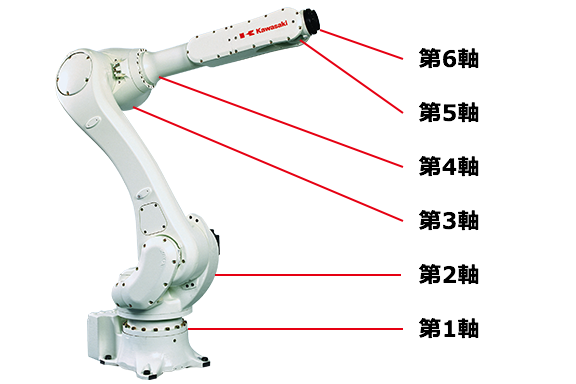
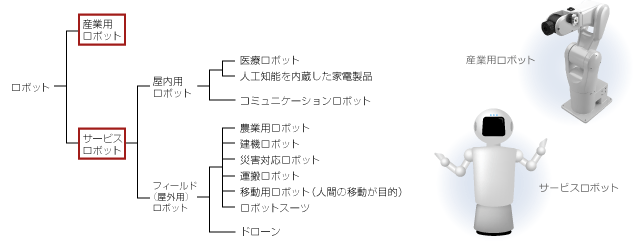
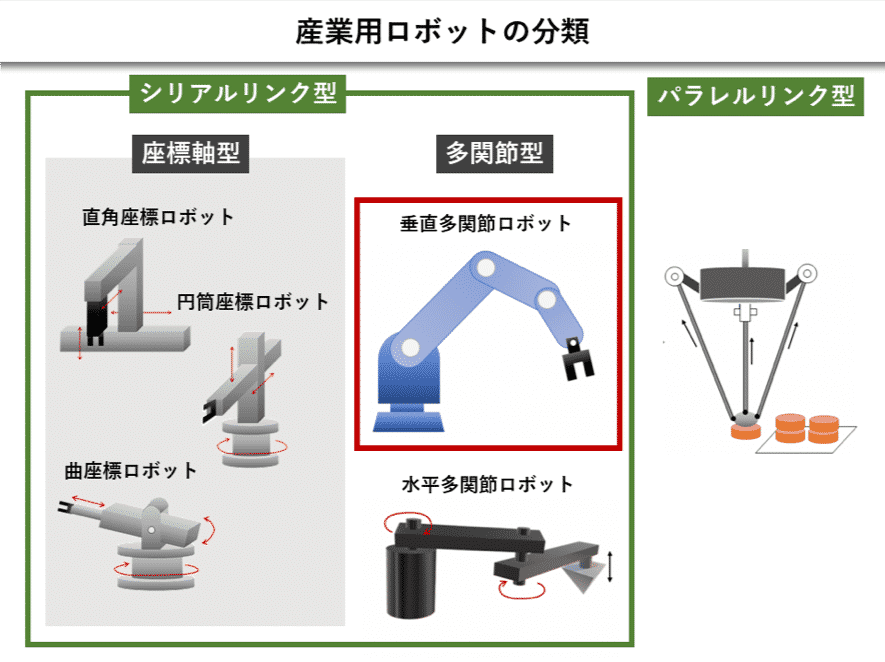
産業用ロボットにはどんな種類がある 主な6タイプの特徴を解説 Xyz 川崎重工業株式会社

Biped Robot In Mel
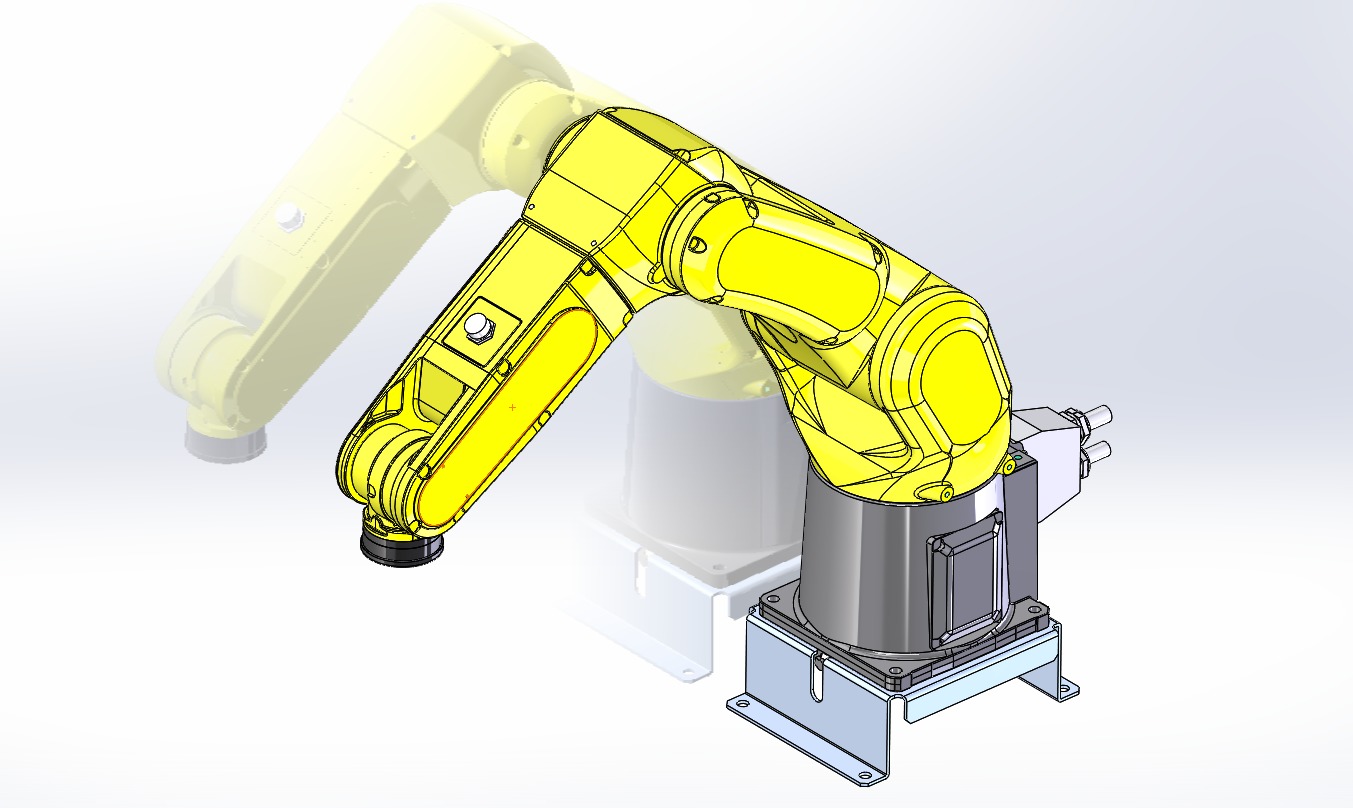
第5関節 第6関節 天井取付 架台取付*1 型名 カタログコード:CLRBTN2A(17年1月現在) 単位:.
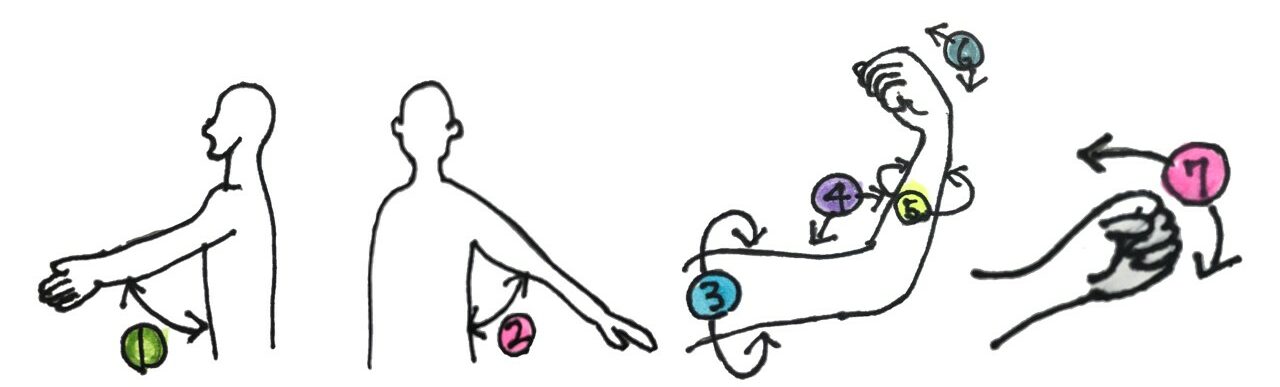
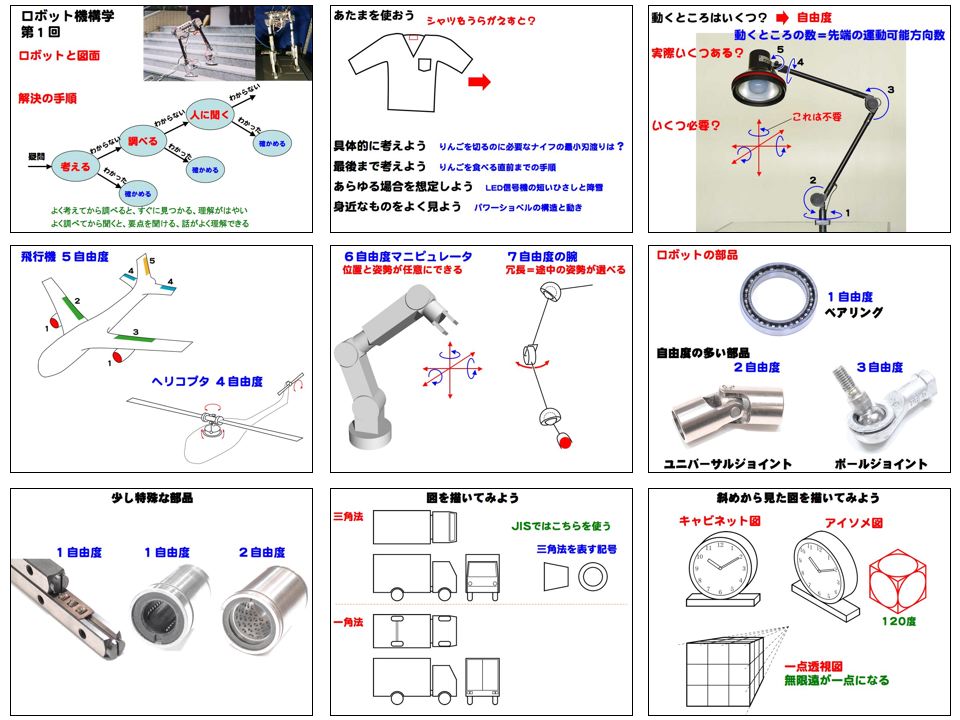
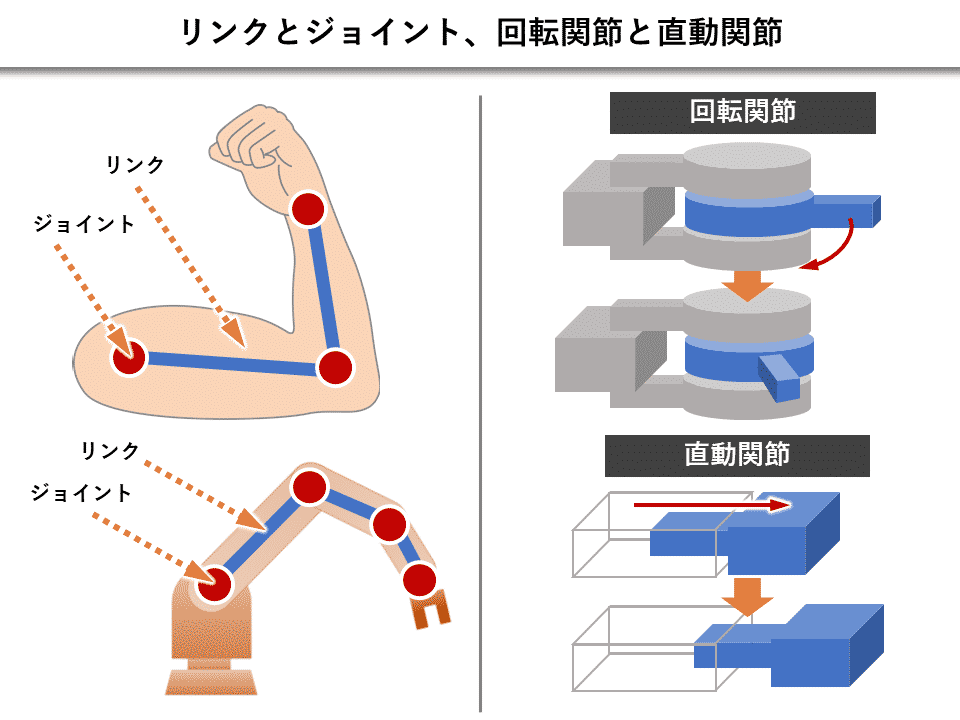
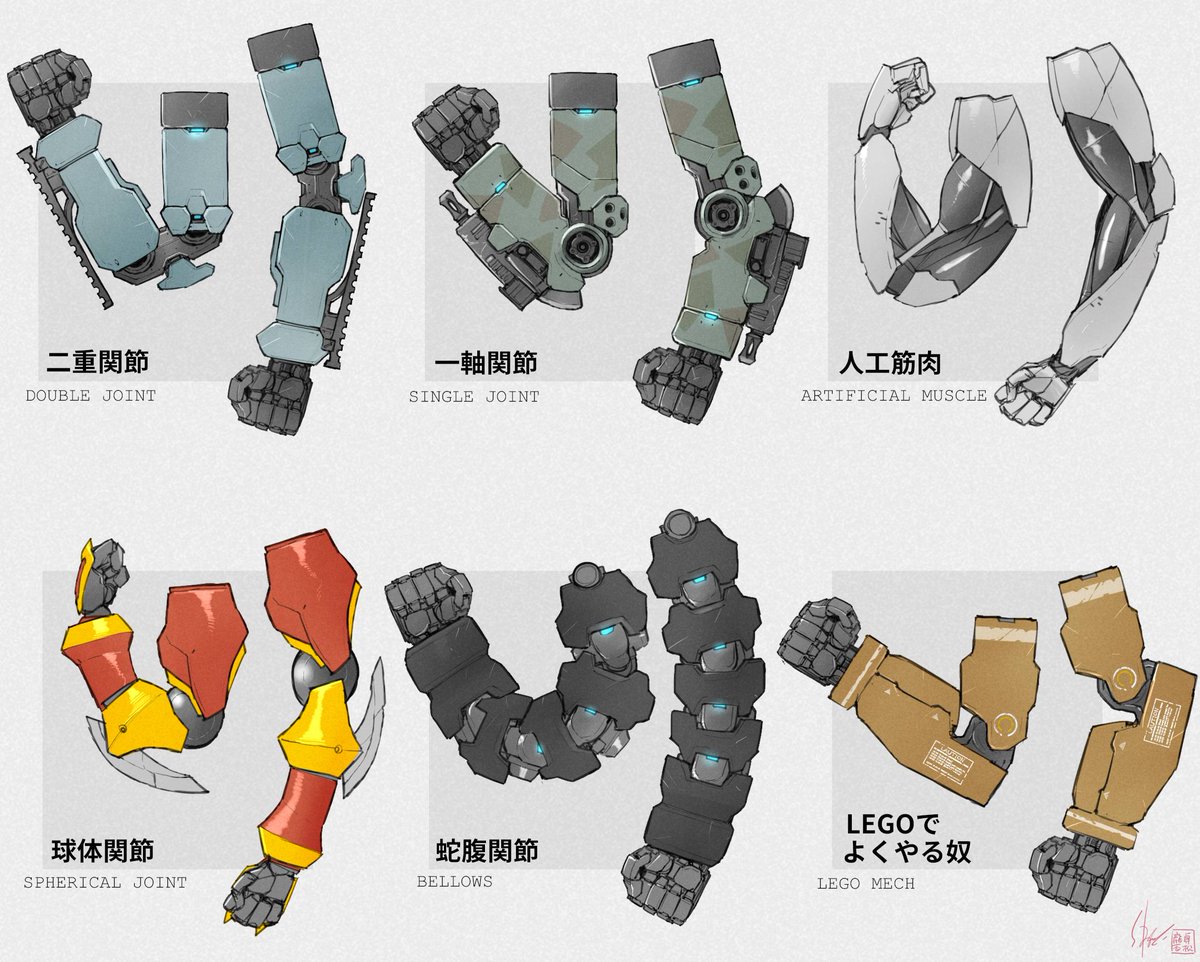
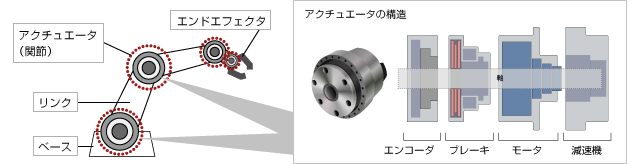
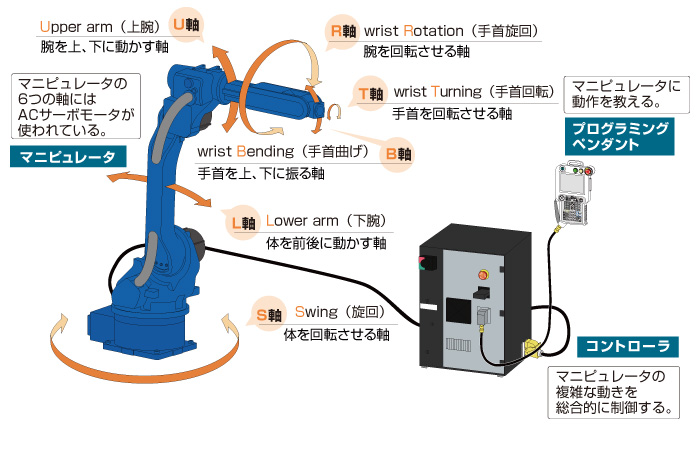
ロボット 関節 構造. Mm 外形図 動作範囲図 ラインを省スペース化したい N2を導入してコンパクトなレイアウトを達成! 新構造アームによるコンパクトなボディとショートカット. - アニメーション作品などで様々な種類が登場して、大人気の「ロボット」。ロボットを描いてみたいのだけれど、体の構造にはどのような種類があるのだろうか。そこで今回は、マシン関節の資料をTwitterにまとめていらっしゃった、サリキョウさんの解説イラストから、ロボットの. ロボットシステム (a)機構構造部・・・アーム,移動機構など (b)動力源および制御装置 (c)エンドエフェクタ(手先効果器)・・・ハンドなど.
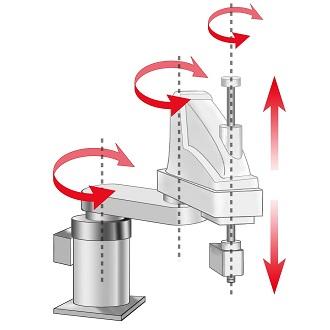
水平多関節ロボットの構造図。 根元から回転・回転・直進という関節配置で、実際は先端にもう1つ回転軸を持つ。 水平多関節ロボット (すいへいたかんせつロボット、SCARA)とは、 産業用ロボット の一種で、水平方向にアームが動作するロボットである。. ① fa用ロボットの種類と用途 ② 各駆動部の方式と構造 ③ ハンド機能の一例 各駆動部の方式と構造 前項で紹介した産業用ロボットの駆動部や可動構造について、下記“ウェハ搬送用ロボット(水平多関節/スカラー型)”をリファレンスとして、その一. ロボットの可動部部分の防塵用として使用します。 カバーの材質・構造を変える事で、耐油・耐熱(溶接スパッタ)・高水密にも対応する 事が可能です。 また、クリーンルーム対応のスカラロボット用カバーとしてもご利用出来ます。.
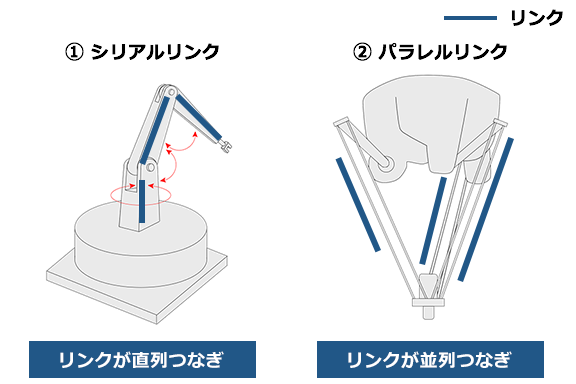
といった進化を遂げてきている.この間,ロボット構造も 大きく変化し,3軸めの駆動も並行リンク式から独立関節式 となりその可動範囲が大きく改善されてきた.また,減速 機の軽量化によってロボット本体も総重量で約30~40%の. ・多関節ロボット 搬送・組立作業に ・スカラロボット ナットランナの交換に ・パラレルリンクロボット ネジ締め作業に ・人型ロボット 組立作業に ・バリ取り・加工ツールチェンジに ・プレスライン 自動化ラインの搬入アームに. RCサーボの制動性能 首痙攣の治療法を検討するに当たって、先ずは首を動かしているMicro Servo 9g SG90の制動性能を確認します。 SG90に円盤を取付け、おもりを載せることで慣性モーメントを変化させ、SG90を設定した角度まで動かした際に円盤を停止させることができるかを観察します。 実際の.
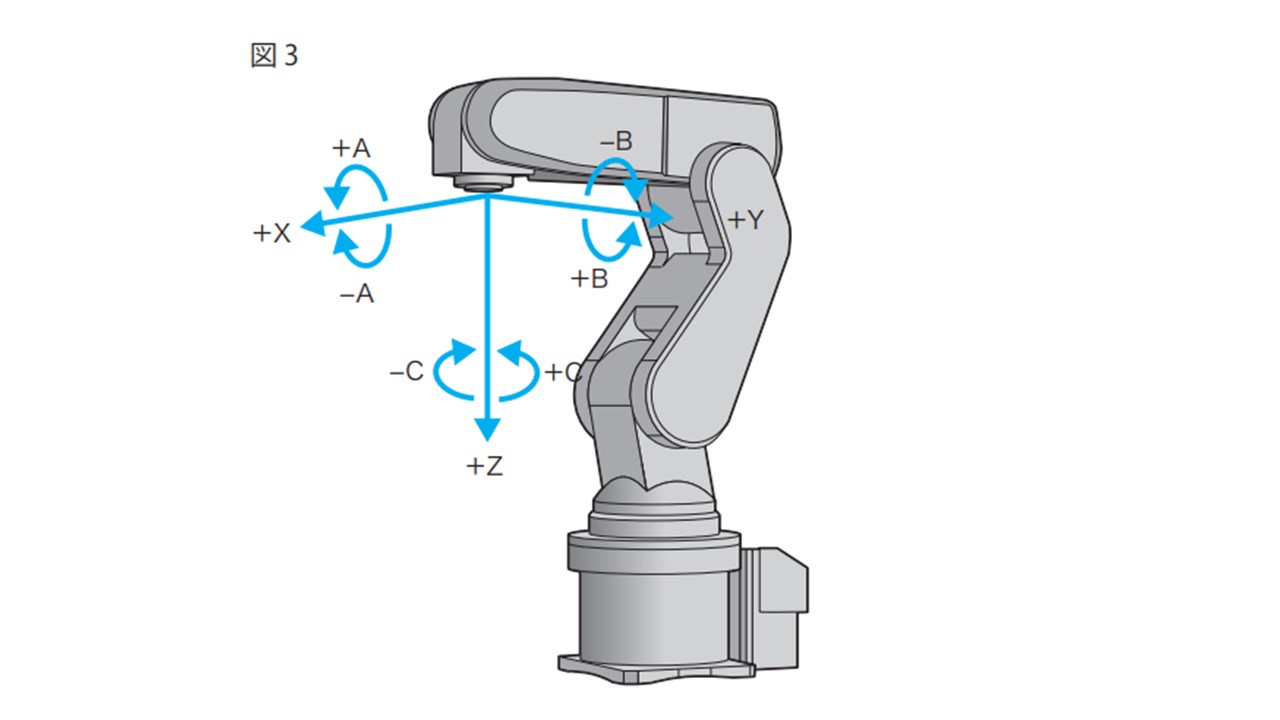
例4.水平多関節ロボットの立体的表現(座標系を付加) 例5.円筒座標ロボットの平面的表現 ※手首の回転ジョイントは、表2の4を用いている。 例6.円筒座標ロボットの立体的表現(座標系を付加). ロボットの機構 ロボットの形 (教科書第2章) ロボットの形態:座標系による分類. (57)要約 課題 本発明は、外見上人間に類似した関節構造、 すなわち、股関節の前後動軸を完全に外側で保持する構 造とすることによって、歩行時の消費パワーを減らすと ともに左右両脚をクロスさせることが可能となる2足歩 行ロボットを提供するものである。.
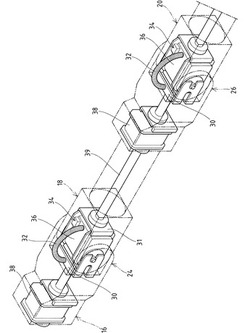
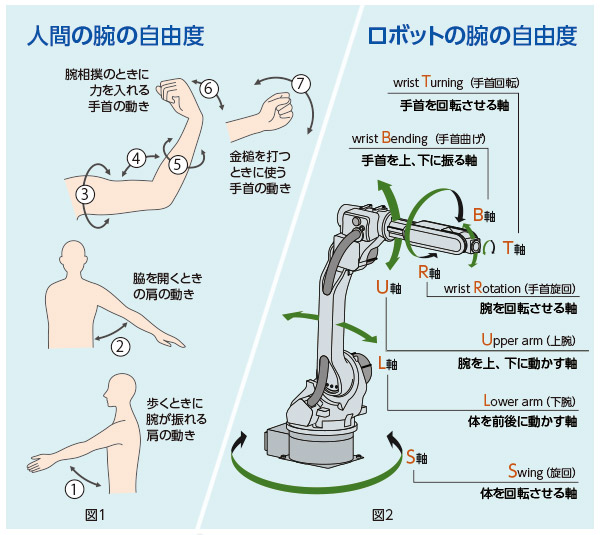
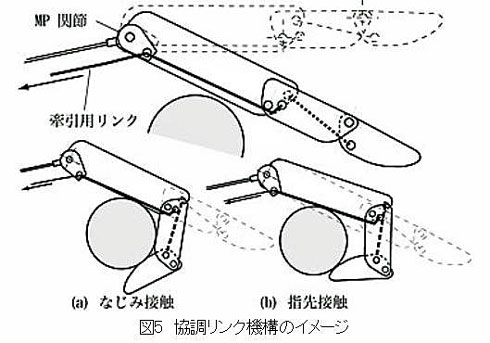
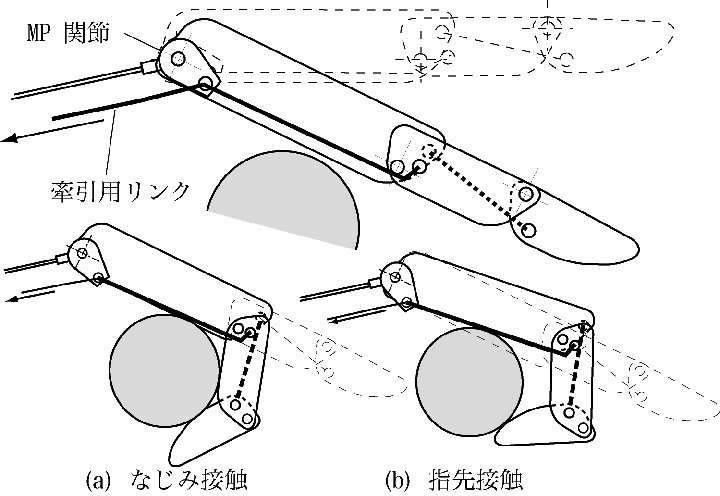
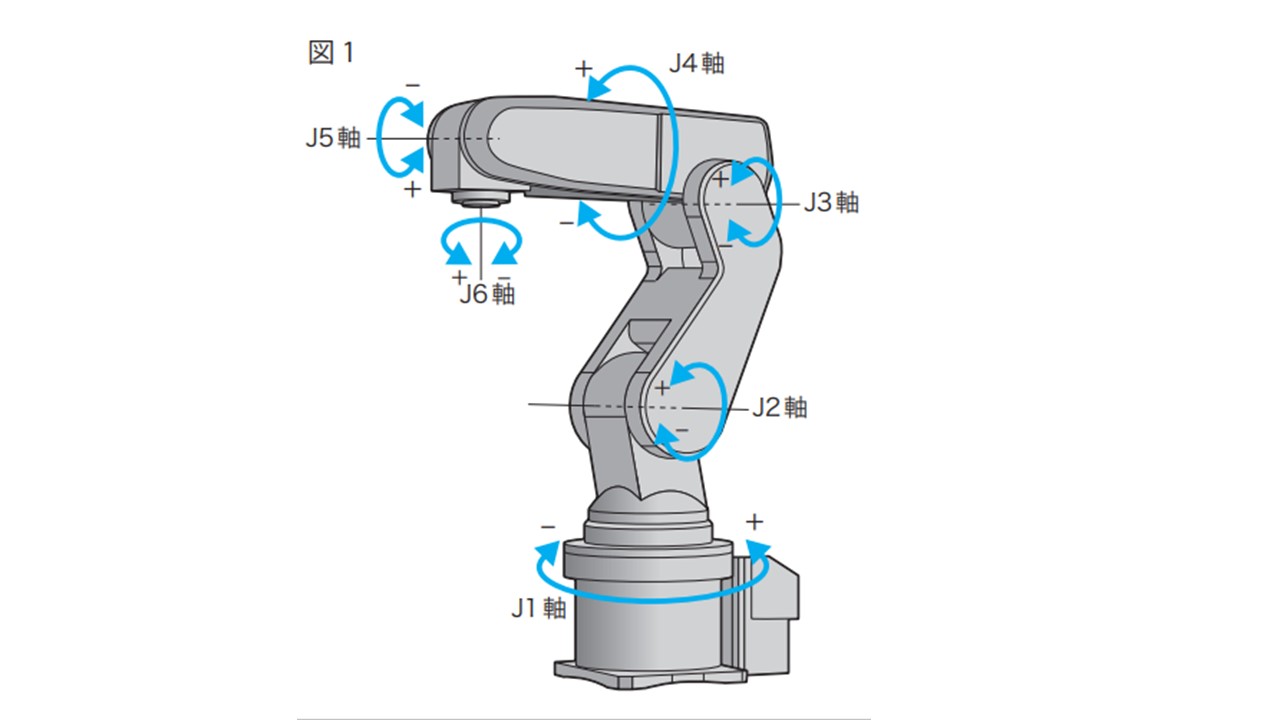
ロボットハンドの制御に関する研究Part II ロボット用アクチュエータ(駆動)機構の開発 (1)腱駆動,(2)空気圧人工筋,(3)丸ベルト捩り機構 アーム搭載型の全方向自律移動ロボットの開発 筋骨格を模した多関節ロボットフィンガと筋電制御. 図4手首3関節の構造 極座標型 円筒座標型 直交座標型 スカラ座 (x r, y r, z r) (x r, y r, z r) (x r, y r, z r) (x e, y e, z e φ e) z0 z0 z0 z0 d3 d3 d3 d4 d2 d2 d1 x x0 l1 l2 θ2 θ1 θ1 θ1 θ2 θ3 図5産業用ロボットの構造. 高い作業能力を持つ垂直多関節型ロボット は良いことばかりではありません。実は 最大の弱点があり、それは構造的に避ける ことが難しい「特異点」問題です。 ロボットでいう「特異点」とは構造的に 制御できなくなる姿勢のことです。図2の.

16 号 ロボット関節構造及びロボット装置 Astamuse
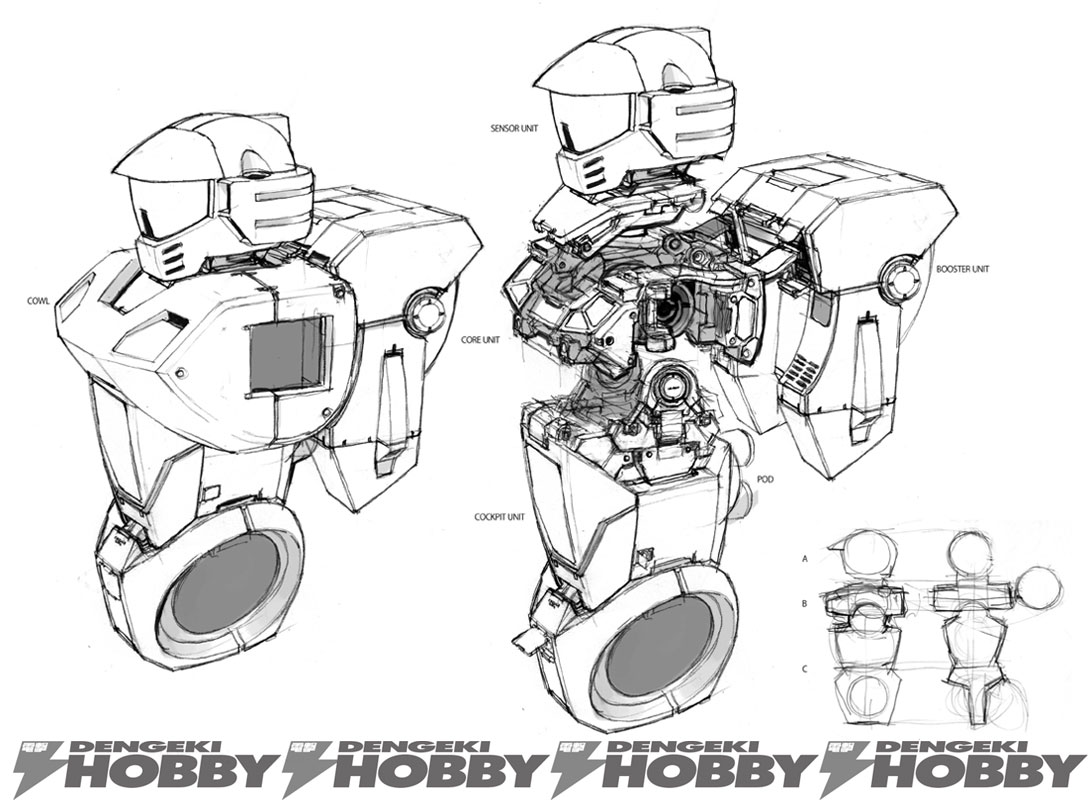
続 Rvの腕部 胴体の機構及び内部構造についての考察 連載 電撃ロボラボ Plus Vol 3 電撃ホビーウェブ
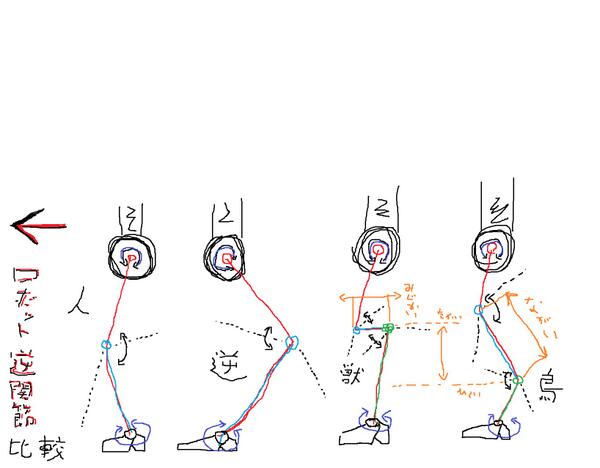
狐 En Twitter ロボットの 逆関節 を言われる構造 を自分なりに分類してみた 逆型は身近な物ですとマクロスのガウォーク等に見られますね ちなみに私は獣型が好きです 鳥型と獣型の違いはロボットによってすごく曖昧なので適当で良いです メカ 逆関節 Http T

15 号 産業用ロボットの関節構造 Astamuse

なぜ人気 垂直多関節ロボットのメリットと用途を構造から解説 ロボット導入 Comブログ ロボット導入 Com
3
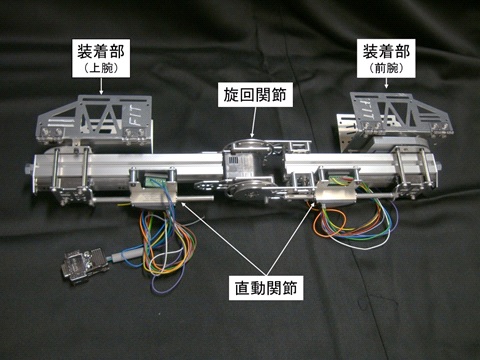
剛体リンクを持つ着用型ロボット関節機構の設計の研究 福岡工業大学 情報工学部 情報システム工学科 森園研究室
ロボットの種類 構造って やさしいwebセミナー

三等兵の別室 11年07月
ロボットとは ロボット 製品 ソリューション 安川電機

ロボットの関節構造 ロボットフィンガ及びロボットハンド
水平多関節ロボット スカラロボット が活きる現場 安長電機株式会社
知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab
Q Tbn 3aand9gcr56gr Co 6ufxxb Cifscn84hisohd5qe7mlze2qmswjpicqai Usqp Cau
マニピュレータ ロボット 関節 関節部にロック機構を設けるもの

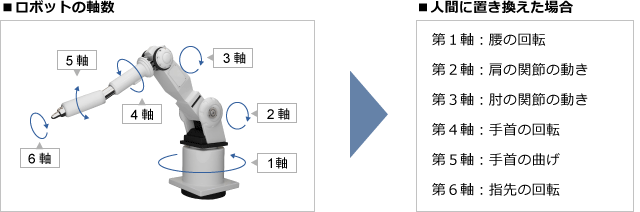
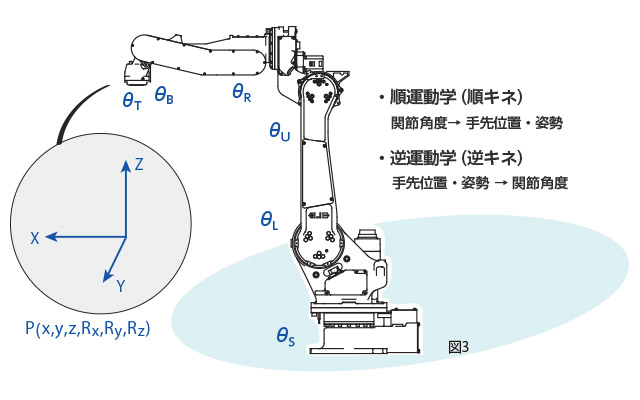
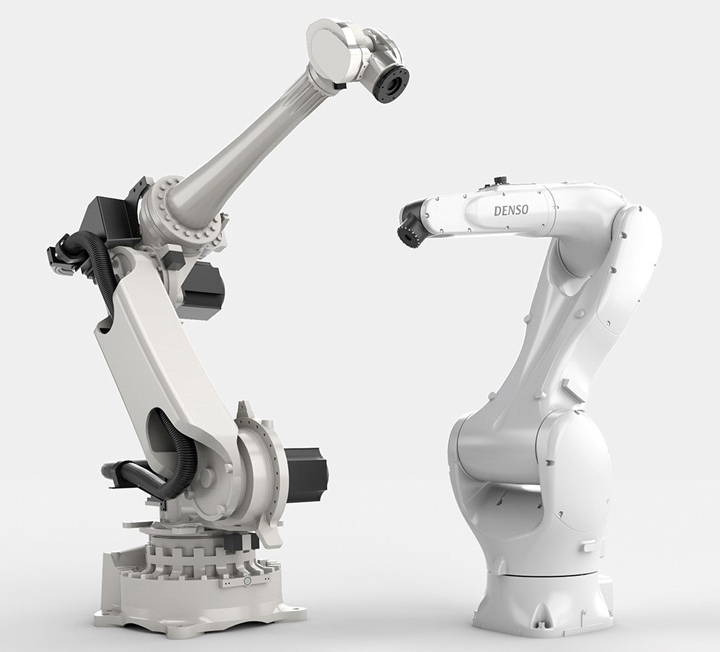
産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

ロボットの関節構造
千葉工業大学 未来ロボティクス学科 ロボット機構学

助教 越智 裕章 研究室とスタッフ紹介 山口東京理科大学 工学部 機械工学科

多軸ロボット用の関節構造体およびこのような関節構造体を備えたロボット

13 号 ロボットの関節構造及びこの関節構造が組み込まれた人間型ロボット Astamuse
Sakaguchi Lab
Q Tbn 3aand9gcrh5abnmq4fh5livwpbjv0exafc Ednku45mqmhhua Usqp Cau

13 号 ロボットの関節構造及びこの関節構造が組み込まれたロボット Astamuse

知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab

産業用ロボットにはどんな種類がある 主な6タイプの特徴を解説 Xyz 川崎重工業株式会社
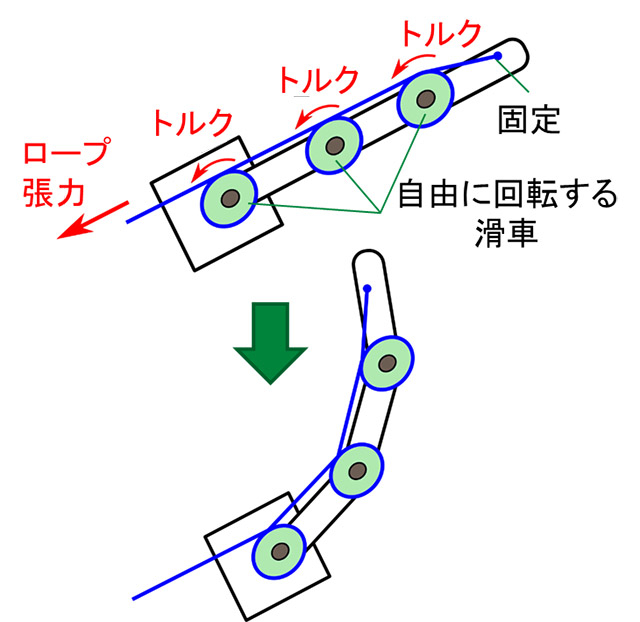
世界最長10 Mの超長尺多関節ロボットアームで 水平方向10 Kg保持を達成 廃炉調査への利用可能性を19年度中に検討予定 東工大ニュース 東京工業大学

フィギュア玩具の関節構造
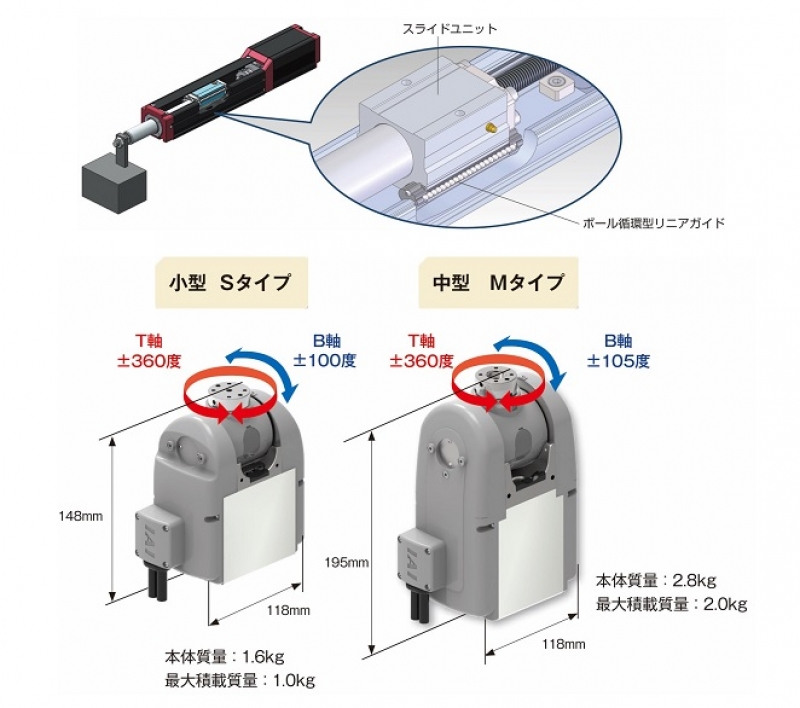
注目製品pickup Vol 14 リーズナブルな単軸 直交でここまでできる 前編 アイエイアイ ロボシリンダー 産業用ロボット に特化したウェブマガジン

産業用ロボット内部の線条体の配線方法

16 号 関節式ロボットアームの手首構造 Astamuse

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社
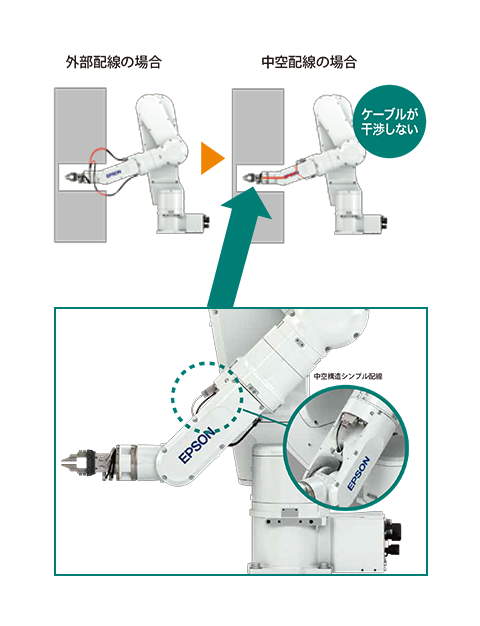
6軸 垂直多関節型 ロボット N6シリーズ 製品情報 産業用ロボット エプソン
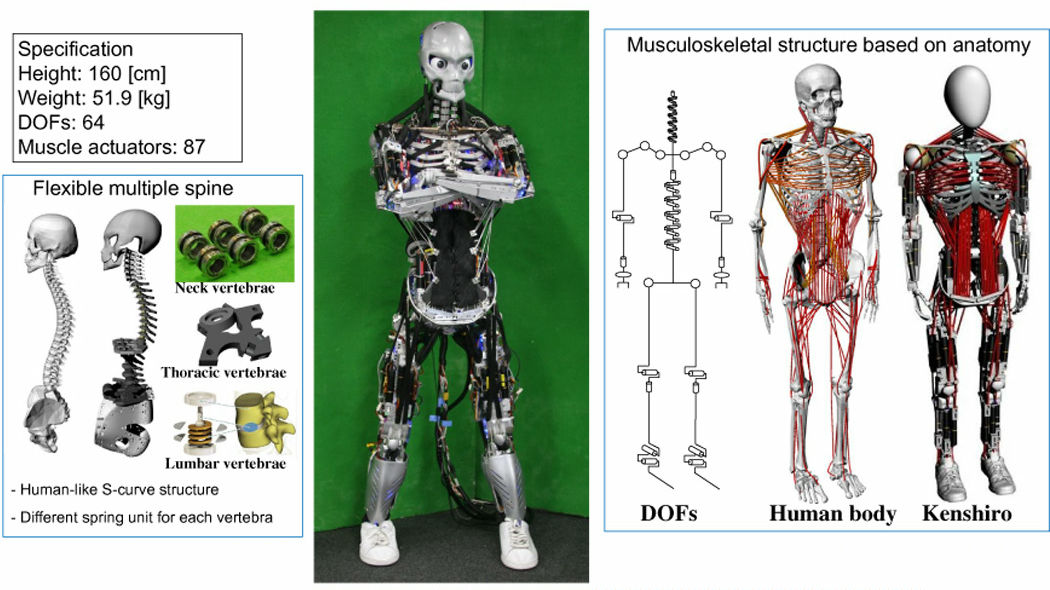
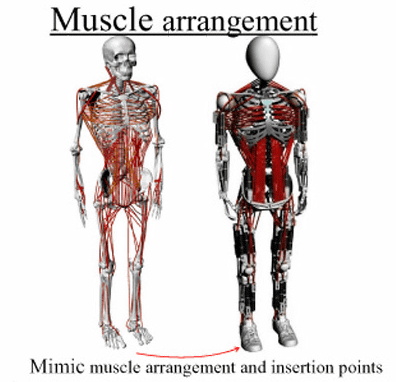
人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine

垂直多関節7軸ロボット Yaシリーズ 垂直多関節ロボット 産業用ロボット ヤマハ発動機

Nec News Release 95 08 30 02
特開18 知財ポータル Ip Force

スカラ ロボットの発想
産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社
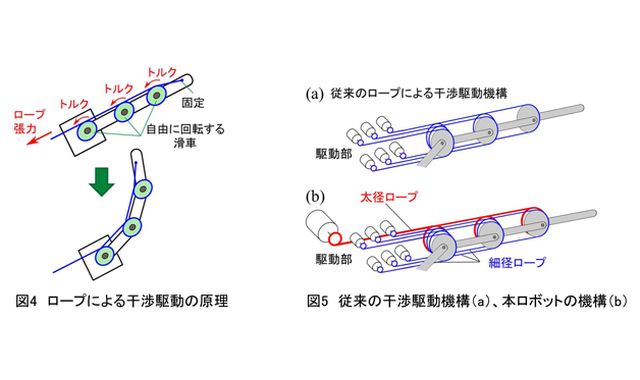
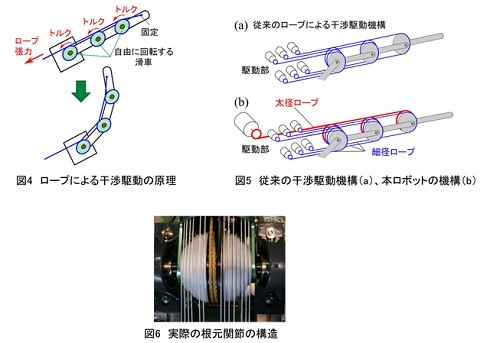
世界最長10mの超長尺多関節ロボットアームで水平方向10kg保持を達成 高強度化学繊維ロープによる新たな多関節駆動機構を開発 Nedoと東工大 Fabcross For エンジニア
特開18 知財ポータル Ip Force

回転駆動装置 ロボットの関節構造及びロボットアーム
産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社
生物模倣4脚ロボットの研究開発 電気通信大学 明研究室

カスタムロボットアーム製作用 Hebi スマートアクチュエータ 日本バイナリー株式会社
知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab

人間とほぼ同じ構造のロボットアーム Gigazine
ロボットの種類 構造って やさしいwebセミナー
マニピュレータ ロボット 指部材の開閉機構 リンク式

なぜ人気 垂直多関節ロボットのメリットと用途を構造から解説 ロボット導入 Comブログ ロボット導入 Com
Http Www Eo U Tokai Ac Jp Eo Suzuki Vl Rt Ad 9c 81 Ae E6 9f E6 8b Pdf

07 号 関節構造体及びロボットアーム Astamuse

人間の指の動きまで完全模倣する超高性能ロボットハンド 攻殻機動隊の世界が現実へ ロボットハンド 攻殻機動隊 ロボット

ロボットの関節構造 ロボットフィンガー及びロボットハンド
全方位スカラロボット Yk Tw スカラロボット 産業用ロボット ヤマハ発動機

スカラ型ロボットの駆動部構造

ナブテスコ 株 産業用ロボット用精密減速機で世界ナンバーワンをひた走る 日本機械学会誌

ロボット関節構造
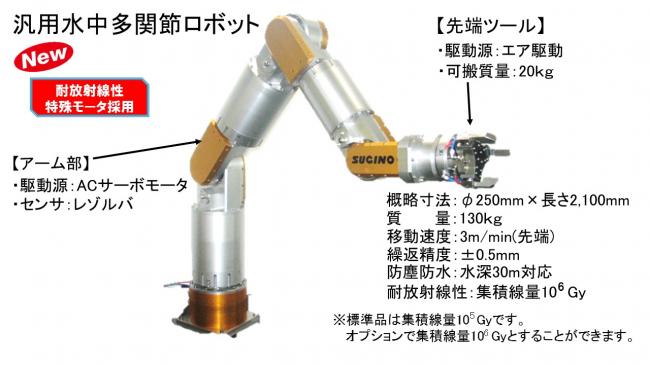
水中多関節ロボット スギノマシン公式ウェブサイト

05 号 ロボット関節構造 Astamuse
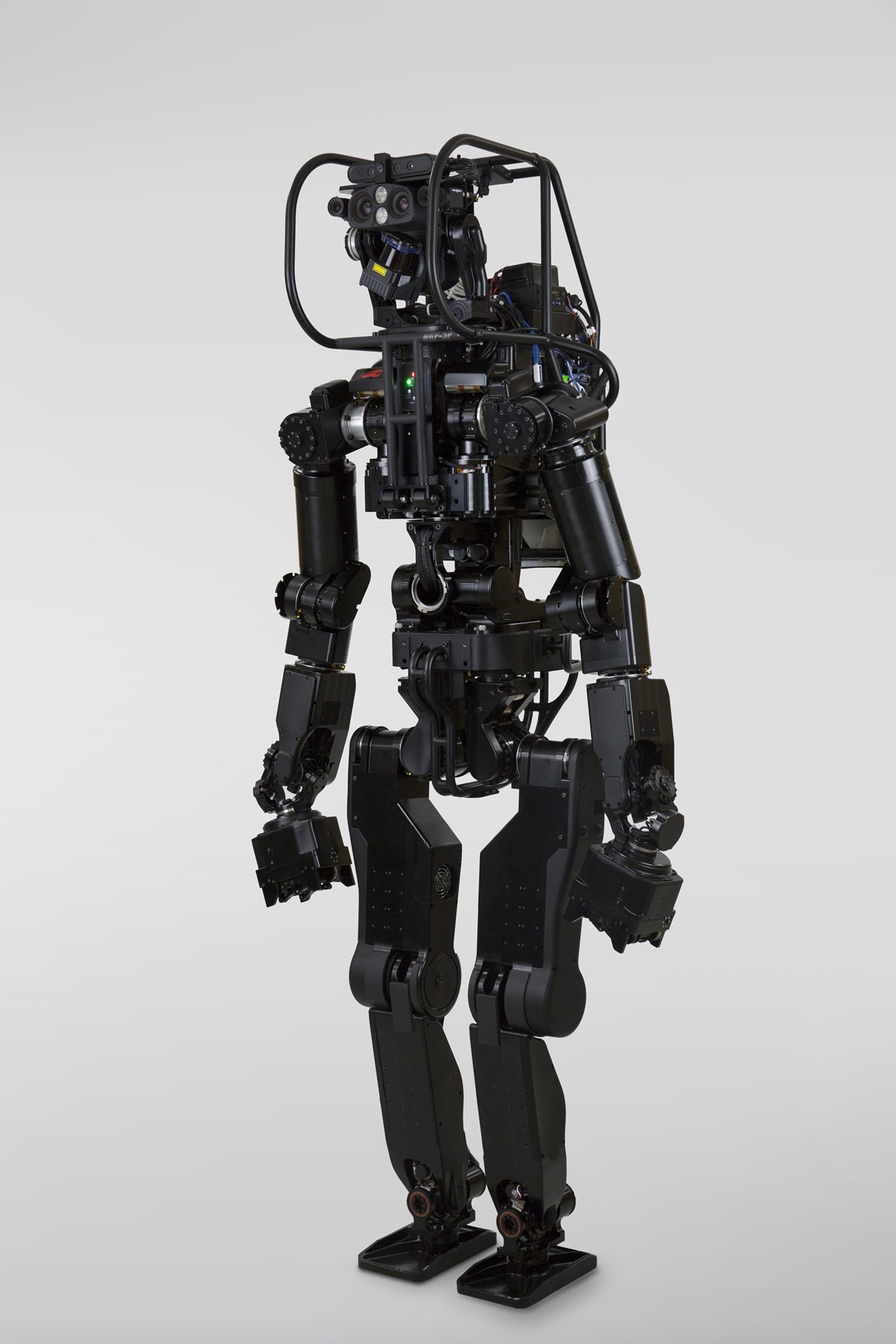
完全自律で石こうボード施工を行う ヒト型ロボット 37の関節軸数とaiを搭載 1 3 Built
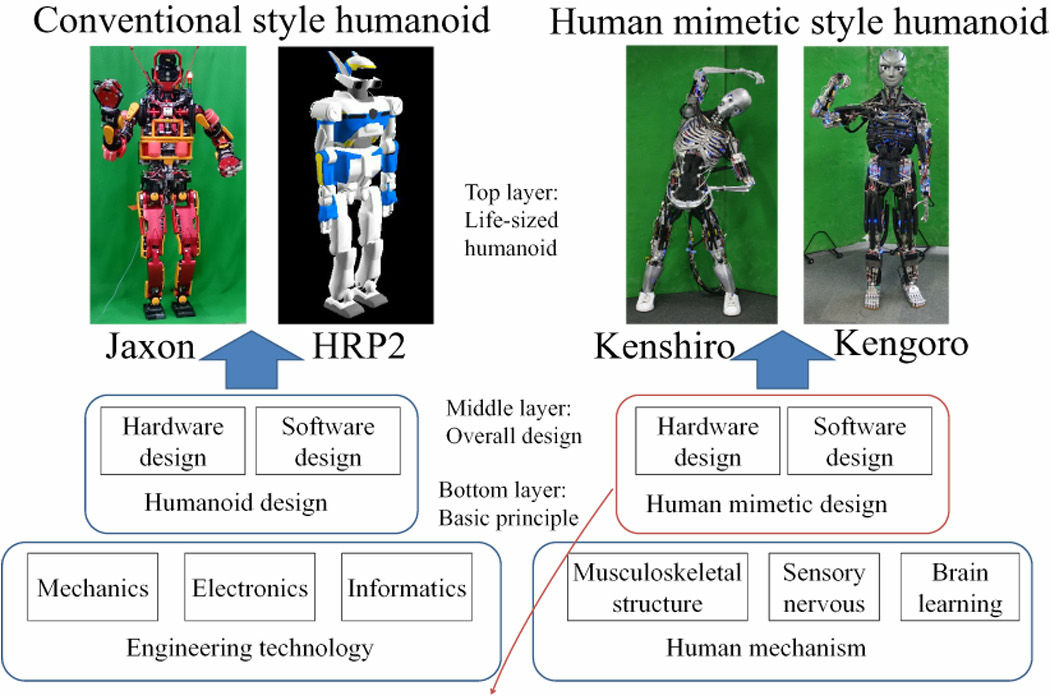
人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine
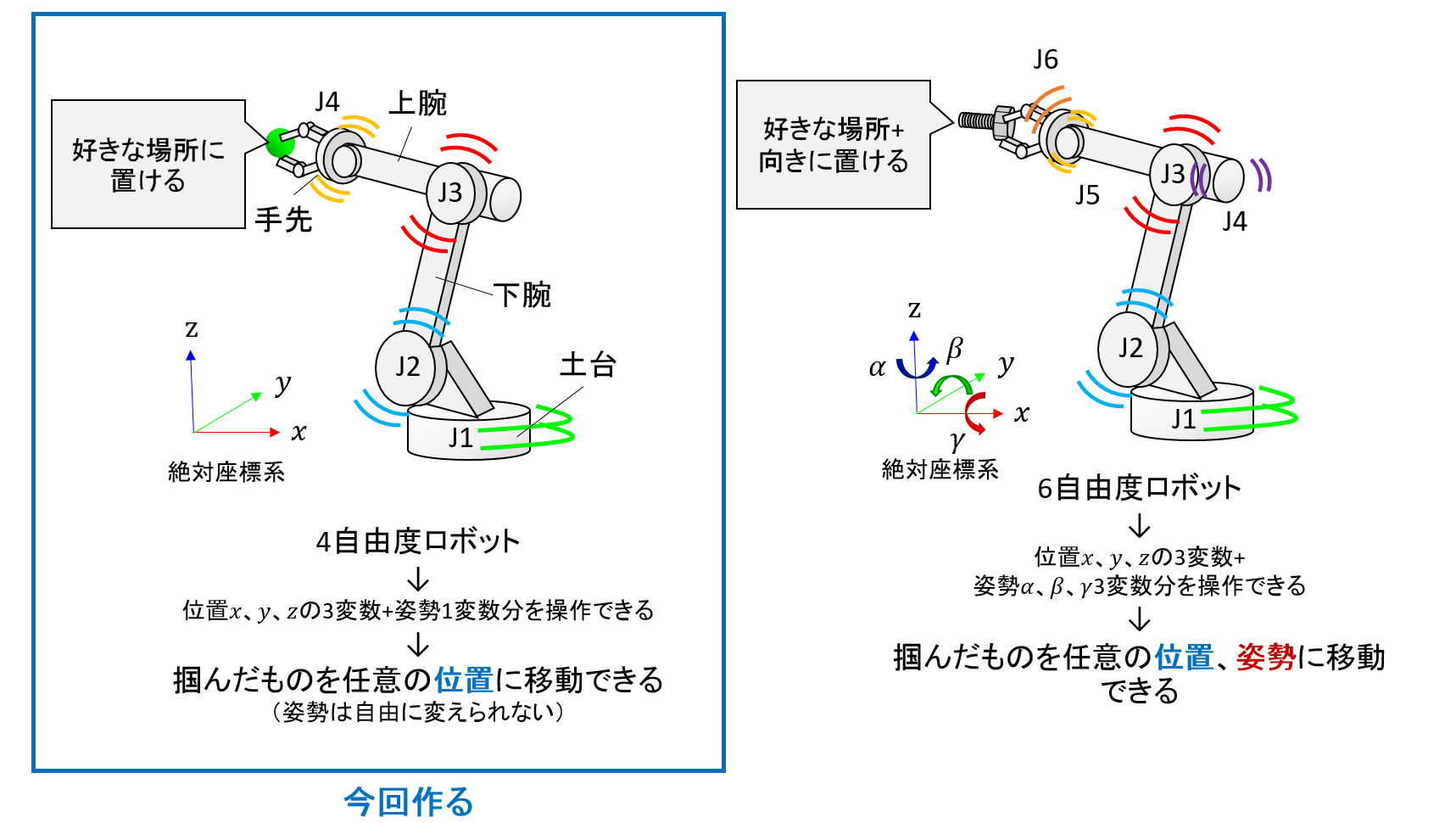
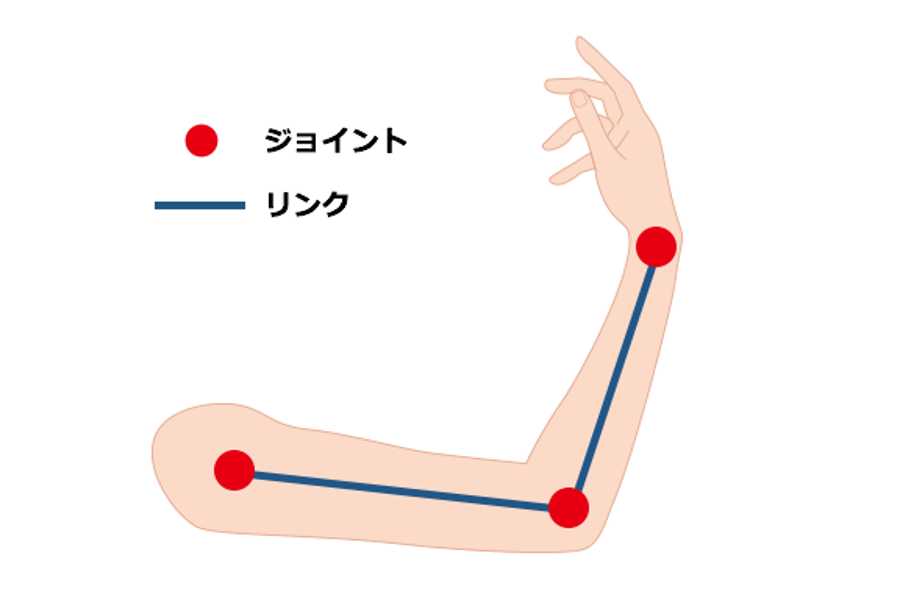
順運動学を使ったロボット描画 製作するロボットの構造説明 メカトロdiy工業
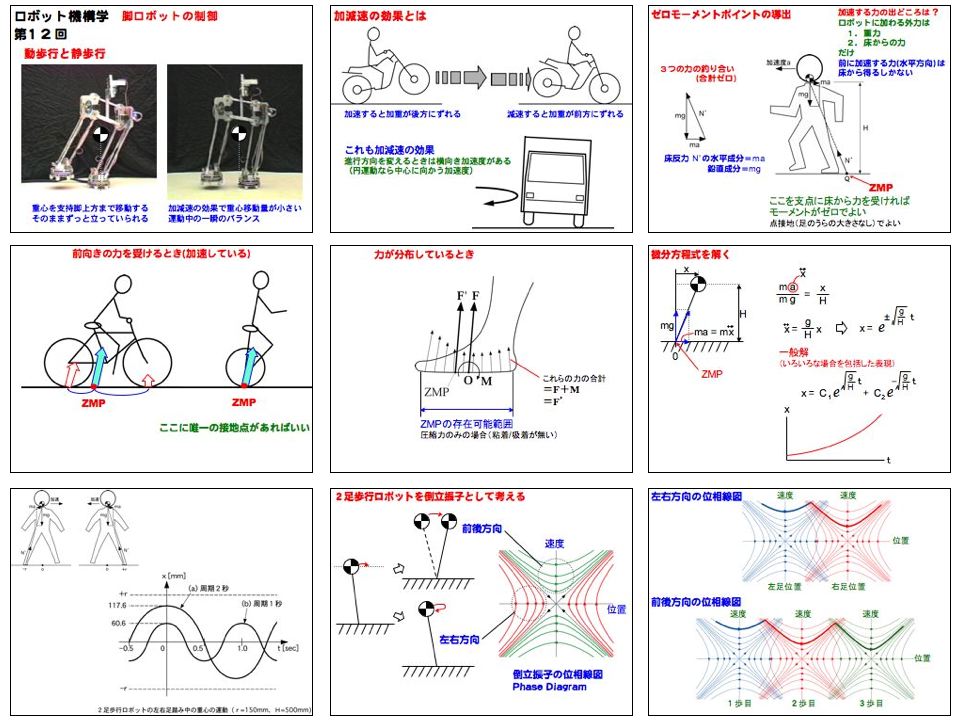
千葉工業大学 未来ロボティクス学科 ロボット機構学
図解 垂直多関節ロボットとは 構造とメリットを解説 ロボットsierの日本サポートシステム

三等兵の別室 人型ロボットに最低限必要な関節 下半身編

エネルギー供給 関節部の配線 ケーブルを回転軸内に貫通させるもの
Q Tbn 3aand9gcq Scfaxo 1omrbeyxtorv1zj7cm4n2cjrrr7cclaw 52j10hk7 Usqp Cau

13 号 ロボットの関節構造及びこの関節構造が組み込まれた人間型ロボット Astamuse
貞松龍壱 ロボットの腕関節いろいろ プラモで麻痺してるけど そもそも人間の腕って180度曲がらないんですよね

大阪大学 細田研究室 研究プロジェクト
ロボットとは ロボット 製品 ソリューション 安川電機
人の手をヒントにした新構造ロボットハンド Nedoなどが3種を試作 紙でも作れる Itmedia News
ロボットの種類 構造って やさしいwebセミナー
Hero X 半分 青い に登場した ピアノを弾くロボットハンドの生みの親とは The Innovator 前編
ロボットの種類 構造って やさしいwebセミナー

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社
知っていますか ロボットのティーチングと仕組みについて お知らせ Mirai Lab

07 号 水平多関節ロボット Astamuse

Wo08 号 ロボットの関節構造及びロボットフィンガ Astamuse
産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

ロボットの関節のデザインイラスト 腕の構造の種類をご紹介 お絵かき図鑑 ロボット スケッチ イラスト キャラクターデザイン
人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine

人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine ヒューマノイドロボット ロボット ロボット工学
全長10mの超長尺多関節ロボットアームで水平方向10kgの保持に成功 Monoist

多関節ロボット

人体比率 骨格構造 関節可動域まで人間を模したヒューマノイドロボットとは Gigazine Humanoid Robot Data Collection Book Cover

ロボットの軸構造とそれを備えた多関節ロボット

06 号 ロボットの関節構造 Astamuse

05 号 ロボットアームにおけるケーブル等の配設構造およびそれを備えた産業用ロボット Astamuse
図解 垂直多関節ロボットとは 構造とメリットを解説 ロボットsierの日本サポートシステム

産業用ロボットはどんな構造 ロボットアームが動く仕組みを徹底解説 Xyz 川崎重工業株式会社

水平多関節ロボット Wikipedia
垂直多関節ロボット新シリーズ 新型コントローラー Rc9 と組み合わせ Monoist
ロボットとは ロボット 製品 ソリューション 安川電機
Http Www Eo U Tokai Ac Jp Eo Suzuki Vl Rt Ad 9c 81 Ae E6 9f E6 8b Pdf
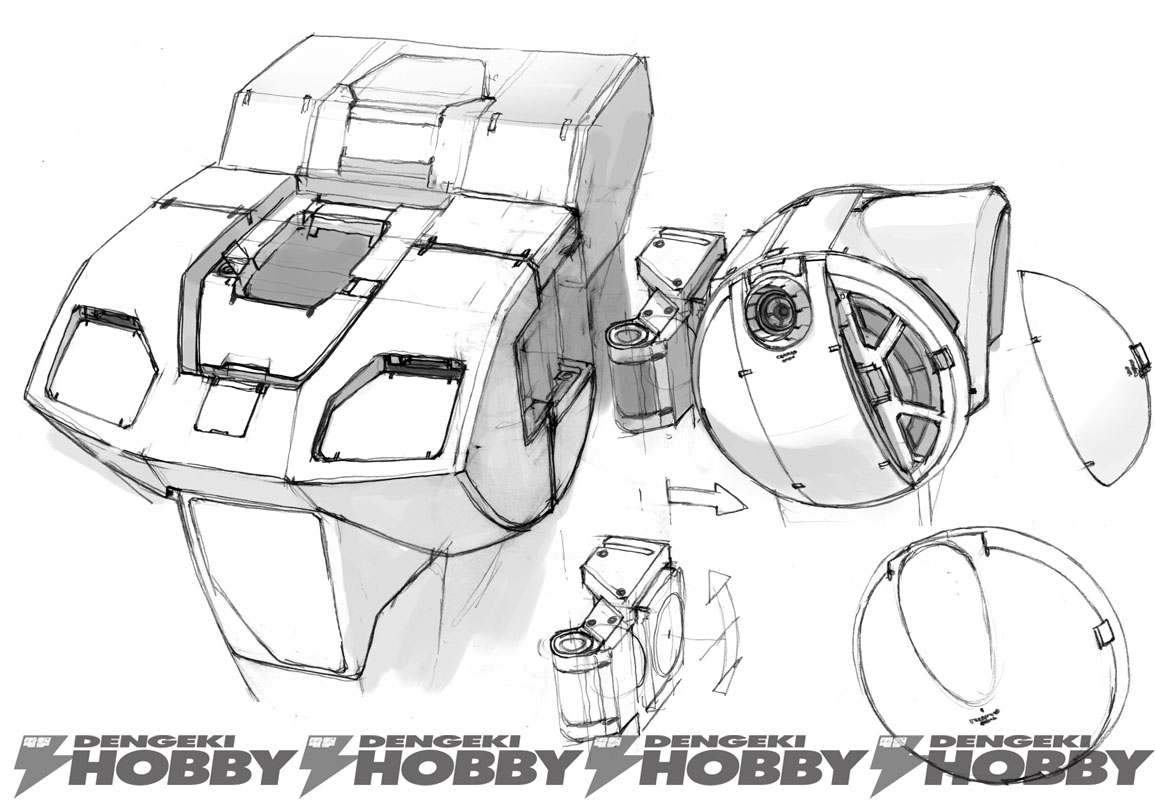
Rvの腕部 胴体の機構及び内部構造についての考察 連載 電撃ロボラボ Plus Vol 2 電撃ホビーウェブ



